

 QQ
QQ
1.需求时调用
***种用法便是***简单的,直接经过ProcCall指令进行调用,由于在同一个任务下,无法完成实时的数据更新,只能在工业机器人运转到某个需求传输数据的工位的时分进行调用,适用于在特定位置的时分进行数据更新。
2.信号调用
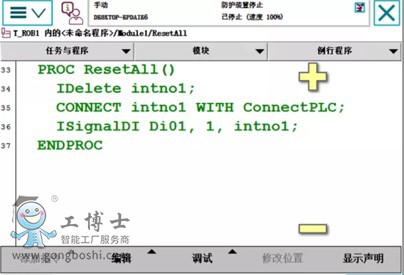
第二种用法便是经过中止相关一个信号。在工业机器人运转时,每当该信号触发的时分,就运转一次通讯程序,进行数据的传输。适用于在需求特定条件下进行数据传输。示例程序下图所示。

说明:当Di01的值为1时,则触发中止(此处的中止程序为ABB机器人串口通讯程序),即会接收一次串口数据。
3.守时调用
第三种用法便是经过守时中止来触发通讯程序。在工业机器人运转时,每隔固守时刻,就会自动触发一次通讯程序,能够达到继续更新数据的作用,适用于需求在工业机器人运转时需求实时获取数据的状况下运用。但下风是只能在程序运转的时分才干看到作用,当工业机器人程序中止时则无法继续传输数据。示例程序如下图所示。
说明:每隔0.5秒,触发一次中止(此处的中止程序为ABB机器人串口通讯程序),即会接收一次串口数据。
4.后台调用
第四种用法便是经过多任务设置后台程序,使其只需在开机状态下能够继续传输数据。需求开通系统选项:623-1 Multitasking才干运用。比照前三个用法的优势是只需工业机器人供电状态且后台程序不出错的状况,就能够完成实时的通讯。
- 下一篇:发那科机器人的安全操作方法
- 上一篇:abb机器人在寒冷的冬天应该怎么进行启动
